【說明】
這組2個光杯可提供訊號腳位調整它的光線強弱,使用時必須至少兩個。其實光杯是一個水銀傾斜開關再附加一個紅色 LED的組合。
【零件表】
| No. | 零件名稱 | 數量 |
| 1 | Light Cup (KY_207) | 2 |
【零件接腳】
| No. | 零件接腳 | UNO R3 / Nano 接腳 |
| 1 | Light Cup A – L | D 2 |
| 2 | Light Cup A – S | D 3 |
| 3 | Light Cup A – V | Vcc |
| 4 | Light Cup A : G | GND |
| 5 | Light Cup B – L | D 4 |
| 6 | Light Cup B – S | D 5 |
| 7 | Light Cup B – V | Vcc |
| 8 | Light Cup B -G | GND |
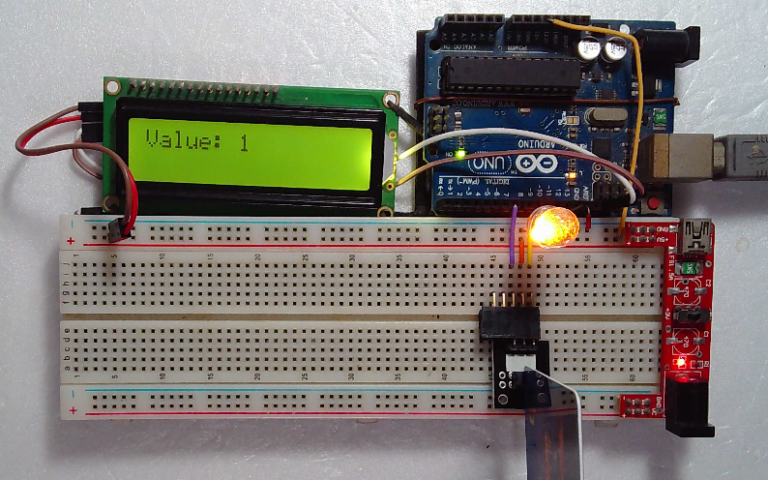
【按線圖】

【應用 1 程式碼】
/* 魔術光杯(KY-027)的應用
* 魔術光杯的應用:使用一組兩個光杯,讓光杯 A 傾斜開啟時累加一個值、
* 光杯 B 傾斜開啟時遞減一個值,當數值 < 128 時光杯 A 為關閉 B為開啟,
* 數值 >= 128 時光杯A 為開啟B為關閉,且組合只有在其中一個開另一個關時
* 才會作用,即兩者同時開或關時,值是不會改變的。
*/
byte LedPinA = 2; // 定義光杯 A Led 腳位
byte SignalPinA = 3; // 定義光杯 A 訊號來源腳位
byte LedPinB = 4; // 定義光杯 B Led 腳位
byte SignalPinB = 5; // 定義光杯 B 訊號來源腳位
byte SignalStatusA = 0; // 定義光杯 A 訊號來源的值
byte SignalStatusB = 0; // 定義光杯 B 訊號來源的值
byte brightness = 0; // 定義開關的值以決定那個光杯開啟或關閉
void setup()
{
pinMode(LedPinA, OUTPUT); // 設定光杯 A Led 腳位為輸出模式
pinMode(LedPinB, OUTPUT); // 設定光杯 B Led 腳位為輸出模式
pinMode(SignalPinA, INPUT); // 設定光杯 A 訊號來源腳位為輸入模式
pinMode(SignalPinB, INPUT); // 設定光杯 B 訊號來源腳位為輸入模式
}
void loop()
{
// 讀取光杯 A 訊號來源的值
SignalStatusA = digitalRead(SignalPinA);
// 若開啟累加 brightness 的值
if(SignalStatusA == HIGH) brightness ++;
// 讀取光杯 B 訊號來源的值
SignalStatusB = digitalRead(SignalPinB);
// 若開遞減 brightness 的值
if(SignalStatusB == HIGH) brightness --;
// 開啟或關閉光杯 A/B
analogWrite(LedPinA, brightness);
analogWrite(LedPinB, 255 - brightness);
// 持續一段時間的開關
delay(25);
}
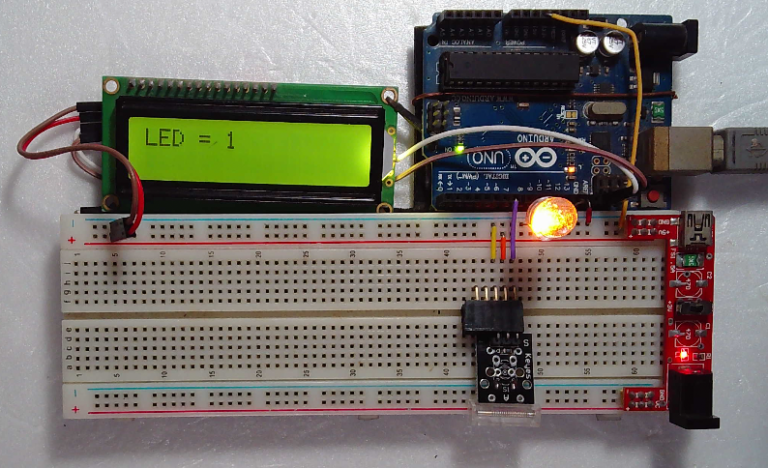
【應用 2 程式碼】
/* 魔術光杯(KY-027)的應用
* 使用一組兩個光杯,放置於一個平台上,當平台向左傾斜時左邊的光杯燈亮,
* 反之右光杯燈亮。
*/
byte LedPinA = 2; // 定義光杯 A Led 腳位
byte SignalPinA = 3; // 定義光杯 A 訊號來源腳位
byte LedPinB = 4; // 定義光杯 B Led 腳位
byte SignalPinB = 5; // 定義光杯 B 訊號來源腳位
byte SignalStatusA = 0; // 定義光杯 A 訊號來源的值
byte SignalStatusB = 0; // 定義光杯 B 訊號來源的值
void setup()
{
pinMode(LedPinA, OUTPUT); // 設定光杯 A Led 腳位為輸出模式
pinMode(LedPinB, OUTPUT); // 設定光杯 B Led 腳位為輸出模式
pinMode(SignalPinA, INPUT); // 設定光杯 A 訊號來源腳位為輸入模式
pinMode(SignalPinB, INPUT); // 設定光杯 B 訊號來源腳位為輸入模式
}
void loop()
{
// 讀取光杯 A/B 訊號來源的值
SignalStatusA = digitalRead(SignalPinA);
SignalStatusB = digitalRead(SignalPinB);
// 開啟或關閉光杯 A/B
digitalWrite(LedPinA, SignalStatusA);
digitalWrite(LedPinB, SignalStatusB);
// 持續一段時間的開關
delay(25);
}
※ 分享結束 ※