【說明】
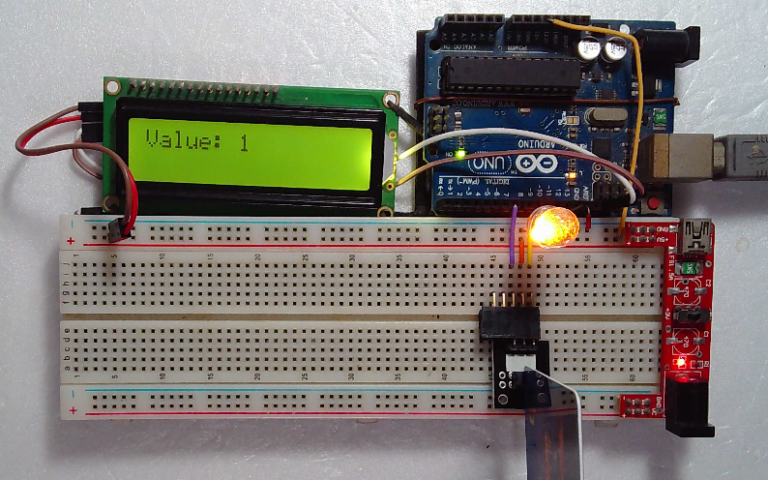
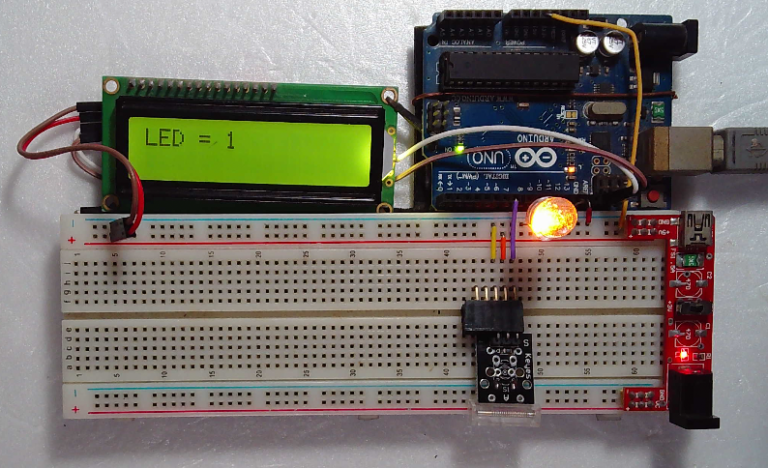
這個感測器使用紅外線(IR)的發射與接收來偵測前方是否有障礙物,偵測的距離約為 7CM,當障礙物位於偵測範圍內時 OUT=0、在範圍外時OUT=1,可應用於機器人或搖控車。 。
【零件表】
| No. | 零件名稱 | 數量 |
| 1 | LCD1602_I2C | 1 |
| 2 | IR_Obstacle_Avoidance Sensor | 1 |
【零件接腳】
請參考 「LCD1602_I2C 顯示器」 接腳。
| No. | 零件接腳 | UNO R3 接腳 |
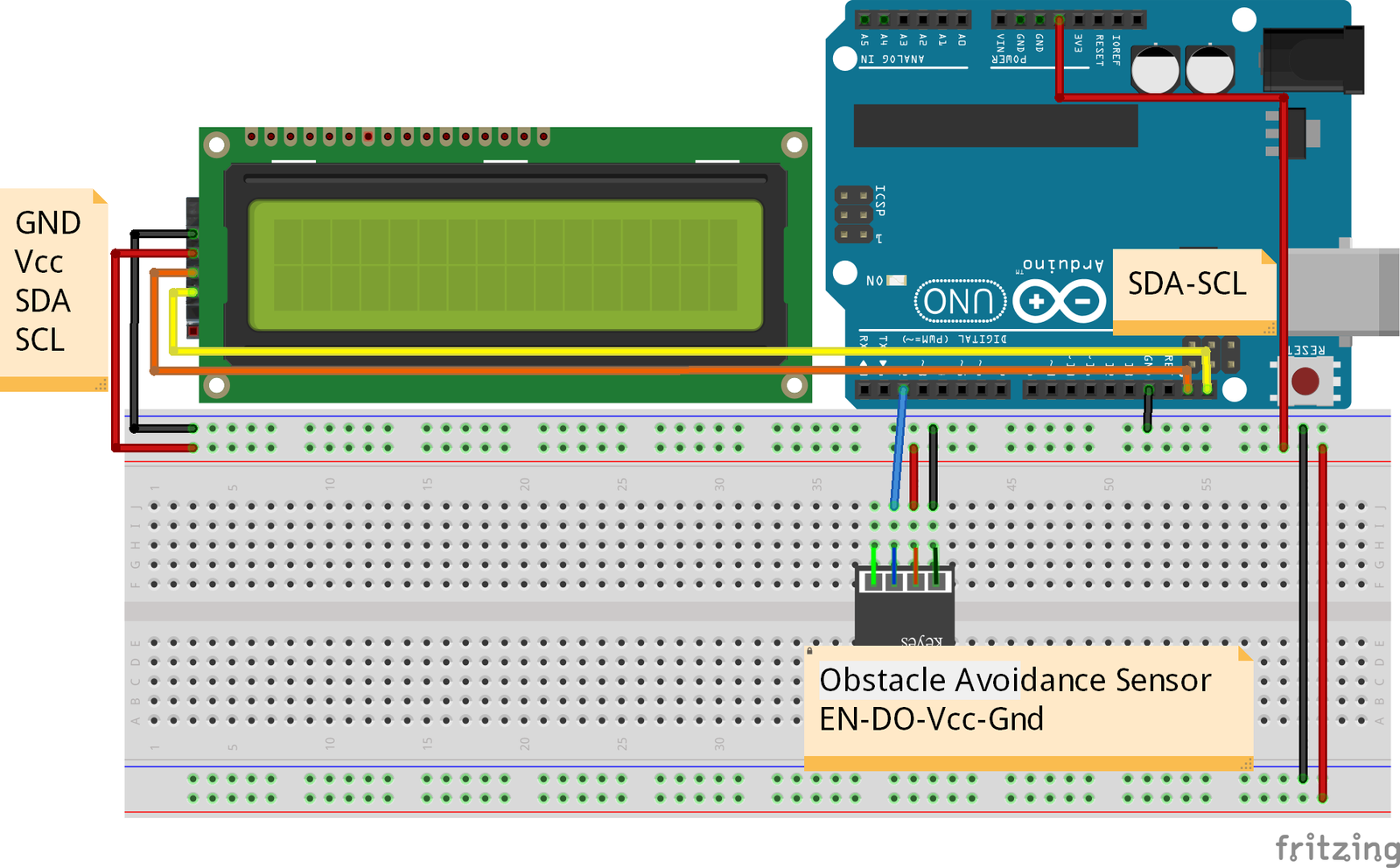
| 1 | G (Ground) | GND |
| 2 | + (Vcc) | Vcc |
| 3 | OUT | 3 |
| 4 | EN | 未使用 |
| 5 | LED | 內建 (D13) |
【按線圖】
【程式碼】
[code]
/*
* 這個感測器使用紅外線(IR)的發射與接收來偵測前方是否有障礙物,
* 偵測的距離約為 7CM,當障礙物位於偵測範圍內時 OUT=0、在範圍外時OUT=1,
* 可應用於機器人或搖控車。。
*/
// 使用 LCD1602 I2C 顯示器顯示結果
// 定義 LCD 元件(位置 0x27 及 16x2 的顯示)
#include <LiquidCrystal_I2C.h>
LiquidCrystal_I2C lcd(0x27,16,2);
byte ledPin = 13; // 定義 LED 接腳
byte inPin = 3; // 定義感測器的接收腳位
byte val=0; // 取得感測器的值
// 程式初化設定
void setup ()
{
lcd.begin(); // 開啟 LCD 元件
lcd.backlight(); // 開啟 LCD 背光
pinMode(ledPin, OUTPUT); // 設定 LED 為輸出模式
pinMode(inPin, INPUT) ; // 設定感測器的接收腳位為輸入模式
}
// 主程式迴圈
void loop ()
{
val = digitalRead(inPin); // 讀取聲音感測器的值
if (val == HIGH) {
digitalWrite(ledPin, LOW); // 障礙物在範圍外 LED=OFF
displayValue(LOW); // 將結果顯示於 LCD 範圍外 Value=0
} else {
digitalWrite(ledPin, HIGH); // 障礙物在範圍外 LED=ON
displayValue(HIGH); // 將結果顯示於 LCD 範圍外 Value=1
}
delay(500); // 暫停 500 ms
}
// 顯示偵測觸發的值
void displayValue(byte value) {
lcd.setCursor(0, 1); // 設定游標位置
lcd.print("Value: ");
lcd.print(value); // 顯示偵測資料的值
lcd.print(" ");
}
[/code]